Rigid body parameters of closed surface meshes
Rigid Body Parameters

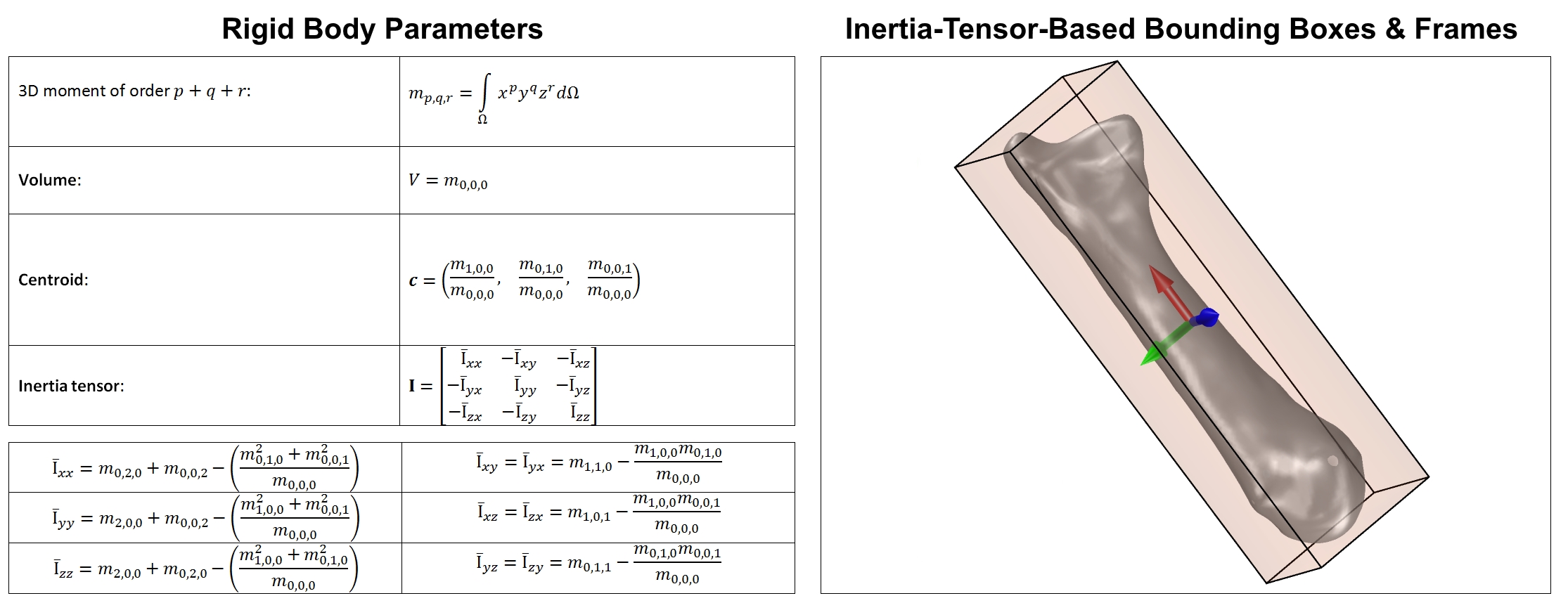
In order to simulate dynamic behaviour of a rigid-body, one requires knowledge of a set of rigid-body parameters such as the total mass of the rigid-body, the center of mass, as well as the moments and products of inertia. The purpose of this submission is to provide a function which computes exact rigid-body parameters of objects represented by closed, triangular surface meshes. The principles underlying the calculations are based on the divergence theorem and are explained in detail in the attached .pdf document. This submission also includes two functions that take as input an arbitrary mesh and output parameters of a primitive object, such as an ellipsoid or a cuboid, with exactly the same inertial parameters as the input object. Finally,VisualizeLocaFrame.mfunction can be used for visualizing local frames of reference constructed from principal axes of inertia.
Quick Demo
load('sample_mesh') RBP=RigidBodyParams(TR); disp(RBP) VisualizeLocalFrame(TR)执行一致和正确的面对东方ation
All calculations are based on the assumption that the input mesh is closed, manifold, and has outward pointing normals. To obtain outward point normals, the vertices of all faces must have counterclockwise ordering. If you know or suspect the input the mesh has either inconsistent or improper face orientation use functionConsistentNormalOrientationprior to computing the rigid-body parameters. Here is an example:
load('sample_mesh') [F,V]=GetMeshData(TR); % Randomly mix-up orientations of the faces to simulate the problem above Nf=size(F,1); idx=randn(Nf,1)>0; F2=F; F2(idx,:)=fliplr(F(idx,:)); TR2=triangulation(F2,V); fprintf('\nNumber of inverted faces: %d\n',nnz(idx)) % Enforce proper face orientation [TR2_fix,cnt]=ConsistentNormalOrientation(TR2); fprintf('Number of faces corrected: %d\n\n',cnt) % Verify that the output is identical to RBP for the original mesh RBP_fix=RigidBodyParams(TR2_fix); fprintf('Corrected mesh:\n') disp(RBP_fix) fprintf('Original (reference) mesh:\n') disp(RigidBodyParams(TR)) % Result you would have gotten without ensuring proper face orientation: RBP2=RigidBodyParams(TR2); fprintf('Uncorrected mesh:\n') disp(RBP2)License
MIT© 2019 Anton Semechkoa.semechko@gmail.com
Cite As
Anton Semechko (2023).Rigid body parameters of closed surface meshes(https://github.com/AntonSemechko/Rigid-Body-Parameters), GitHub. Retrieved.
MATLAB Release Compatibility
Platform Compatibility
Windows macOS LinuxCategories
Tags
Acknowledgements
Inspired:CLUMP: Code Library to generate Multi-sphere Particles,Asteroid Shape Data Explorer
Community Treasure Hunt
Find the treasures in MATLAB Central and discover how the community can help you!
Start Hunting!Discover Live Editor
Create scripts with code, output, and formatted text in a single executable document.
Auxiliary Functions
Auxiliary Functions/Remeshing
Versions that use the GitHub default branch cannot be downloaded
| Version | Published | Release Notes | |
|---|---|---|---|
| 1.5.0.2 | Use README.md from GitHub |
|
|
| 1.5.0.1 | Add 'ConsitentNormalOrientation.m' to ensure consistent and proper face normal orientation. |
|
|
| 1.4.0.1 | - submission description update |
|
|
| 1.4.0.0 | - migrated to GitHub |
|
|
| 1.3.0.0 | - no changes were made |
||
| 1.2.0.0 | Forgot to include a number of auxiliary functions used during visualization. This submission contains all of the necessary functions. |
|
|
| 1.1.0.0 | e -修正了附件文档xplaining the calculations implemented in this submission. |
||
| 1.0.0.0 |
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- 意大利(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)
Asia Pacific
- Australia(English)
- India(English)
- New Zealand(English)
- 中国
- 日本Japanese(日本語)
- 한국Korean(한국어)