rlim
设置或查询r-轴限制极轴
描述
rlim(汽车)让MATLAB®选择r设在限制。此命令设置RLimMode属性的极轴对象“汽车”.
rlim(手动)防止限制自动更改。控件向极轴添加新数据时,如果希望保留当前限制,请使用此选项抓住命令。此命令设置RLimMode属性的极轴对象“手动”.
米= rlim(“模式”)“汽车”或“手动”.默认情况下,该模式是自动的,除非您指定限制或将模式设置为手动。
例子
指定r轴限制
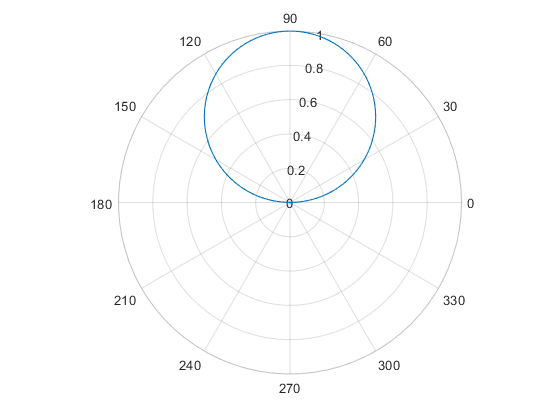
创建一个极的情节和改变r设在限制。
= 0:0.01:2*;Rho = sin(2*) *cos(2*)极坐标(theta,rho) rlim([0 1])

将限制设置回原始值。
rlim (“汽车”)

绘制负半径值
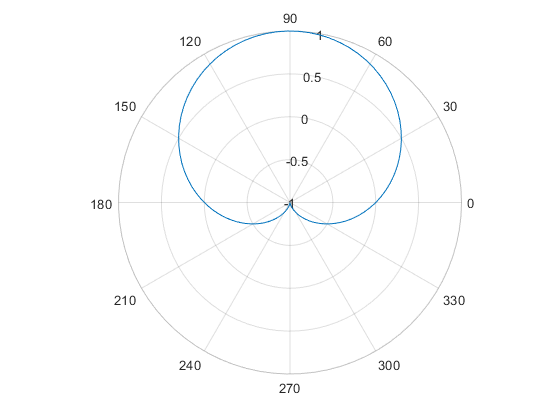
使用负半径值创建极坐标图。默认情况下,polarplot通过原点反映负值。
= linspace(0,2*);Rho = sin(theta)polarplot(θ,ρ)
的限制r-axis,所以它的范围是-1到1。
rlim ([1])
返回r轴限制
创建一个极坐标图并返回r设在限制。
= 0:0.01:2*;Rho = sin(2*) *cos(2*)polarplot(θ,ρ)

Rl = rlim
rl =1×20 0.5000
指定r-特定极轴的轴限
通过将极轴对象指定为的第一个输入来设置特定极轴的限制rlim.否则,rlim设置当前轴的限制。
Pax =偏光轴;rlim (pax [0 5))

输入参数
输出参数
在R2016a中引入
您也可以从以下列表中选择一个网站:
